Move a Softbody Car
A Car Softbody is formed of 2 Softbodies that act as the wheels, and a Softbody for the car frame that connects the two with 2 Pin Joints with Motor. This tutorial is also available in the GitHub repo as a sample samples/softbody2d/car-demo.
Create two new SoftBody2D wheel nodes
Similar as previous tutorial, create two Softbody and add the texture samples/softbody2d/Boiled_Egg_Half.png to them. Move them a bit apart. You should see in the 2D scene view the following:
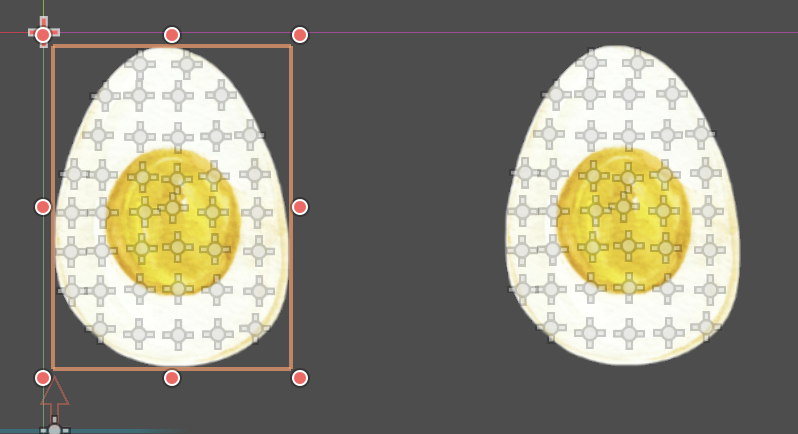
Name them Wheel 1 and Wheel 2.
Create a World Boundary
Create a RigidBody2D and add as child a CollisionShape2D with Shape set to WorldBoundaryShape2D and move it below the Softbodies.
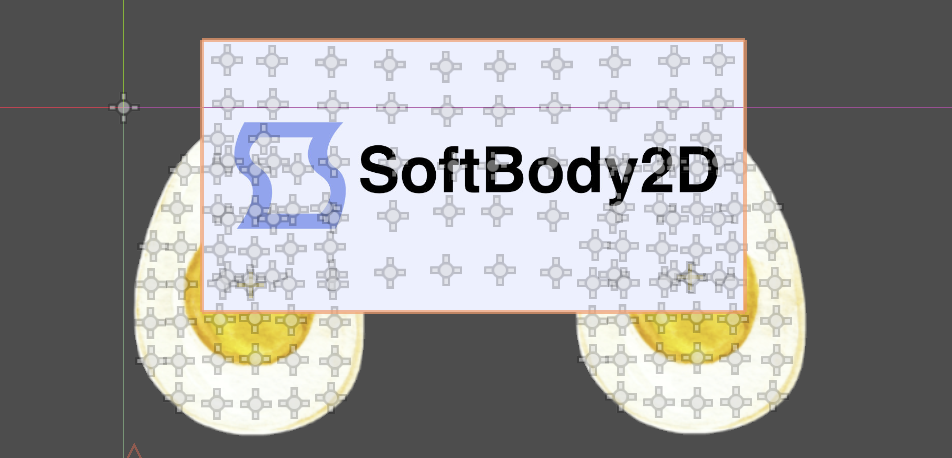
Create a SoftBody2D frame node
Create a Softbody and add the texture samples/softbody2d/softbody2d_banner.jpg to them. Rename it to Frame. Scale it to 0.4 for both X and Y at the Transform property. Move it a bit on top of the two wheels. You should see in the 2D scene view the following:
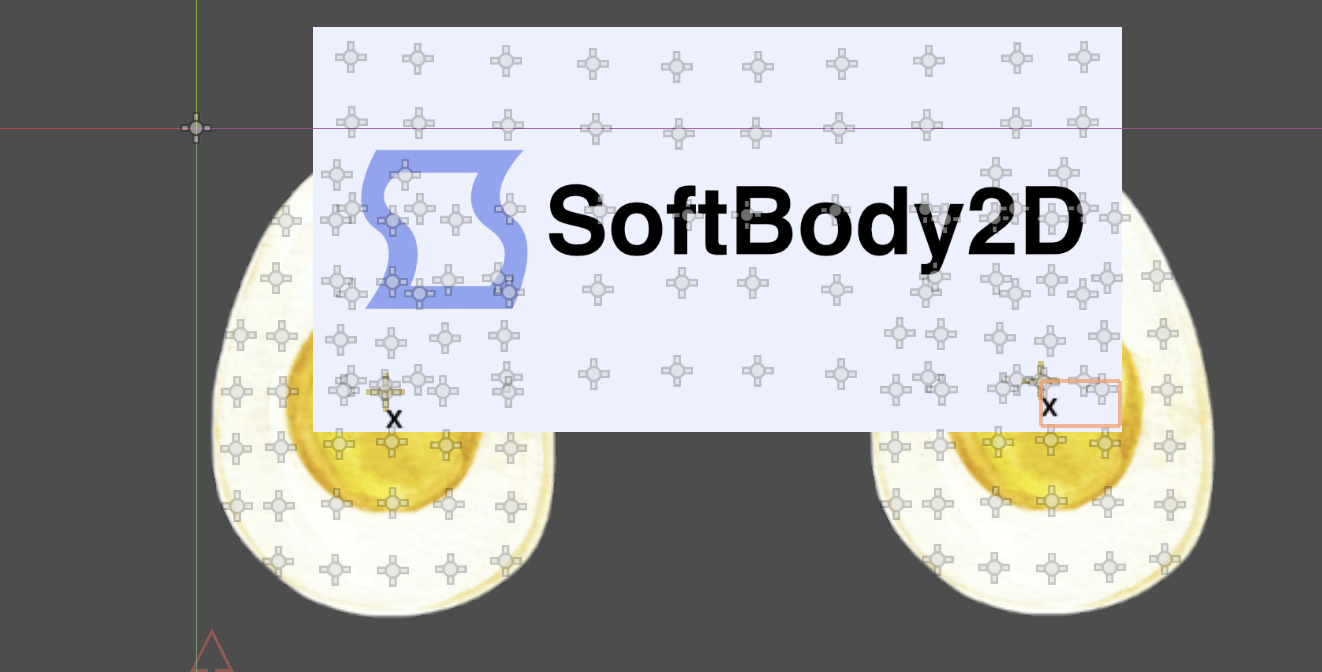
Create the PinJoint2D nodes
Create two PinJoint2D nodes placed on the center of the wheels.
You should now have the following car:
Now connect the pinjoints Node B to the Rigidbody closest on the Frame Softbody, and the Node A to the corresponding Rigidbody from each Wheel Softbody. Eg. for me the following were set:
-
Node A for first pinjoint:
../../Wheel 1/Bone-15 -
Node B for first pinjoint:
../Frame/Bone4 -
Node A for second pinjoint:
../../Wheel 2/Bone-15 -
Node B for first pinjoint:
../Frame/Bone44
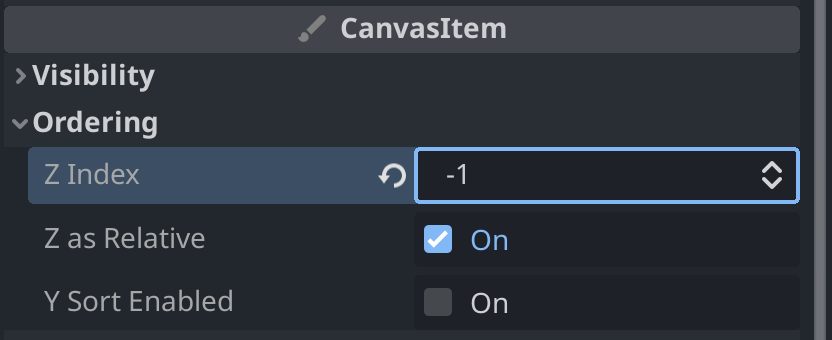
Next, go to the Frame Softbody and set it's z_index to -1 so it's behind the wheels:
Next, add the following Script on the root node:
extends Node2D
@onready var pin1 : PinJoint2D = $PinJoint2D
@onready var pin2 : PinJoint2D = $PinJoint2D2
const SPEED = 6000
# Called every frame. 'delta' is the elapsed time since the previous frame.
func _physics_process(delta: float) -> void:
var direction := Input.get_axis("ui_left", "ui_right")
if direction:
pin1.motor_enabled = true
pin2.motor_enabled = true
pin1.motor_target_velocity = direction * SPEED
pin2.motor_target_velocity = direction * SPEED
else:
pin1.motor_enabled = false
pin2.motor_enabled = false
Try it out
Click the Run Current Scene button. If you did everything right, you will see the following: